There are several factors that can contribute to the avatar looking skewed drifted, including sensor placement, calibration, and whether Returns to the Ref Pose are used to correct for drift.
Ensuring the sensors are placed correctly and the calibration is performed well are crucial steps for data integrity. Here are some initial troubleshooting steps to follow before contacting Noraxon Support for further assistance.
1. Check to ensure sensors are placed correctly on all body segments. The sensors must be oriented so that the LED is pointing upwards, and sensors placed bileterally should be symmetric on both sides. For more details about sensor placement, follow our IMU Sensors Placement Video Tutorial🔗 and sensor placement instructions in the Ultium Motion Quick Start Guide🔗.
2. Zero Gyros each day before measurement. This step is meant to remove any offset bias from the internal gyro components, and is necessary as a maintenance procedure.
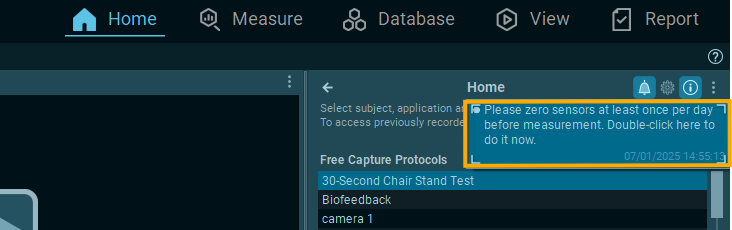
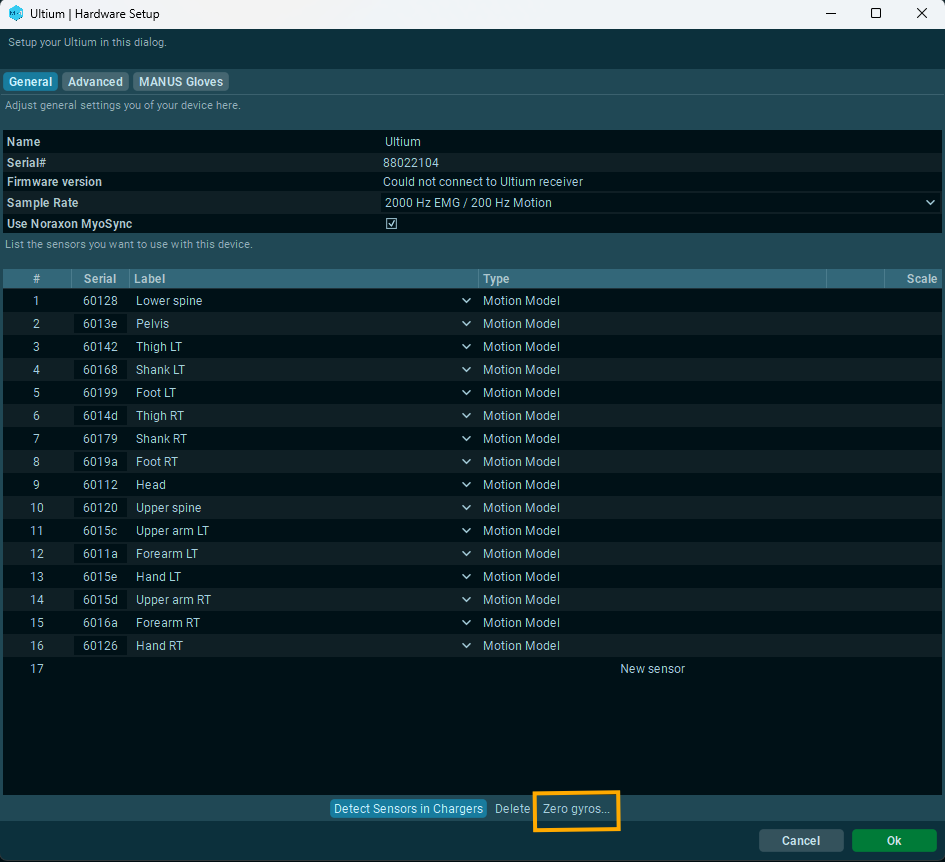
Gyros can be zeroed by clicking on the notifications bell from the Home tab or from the Ultium device setup in the Hardware Setup.
Zero gyros from the Home tab:
Zero Gyros from the Ultium Device Setup:
3. Ensure you are using a Functional Calibration routine (e.g. the Walking Calibration or Forward Lean Calibration) and that you are capturing Returns to Ref Poses at least at the beginning and the end of each measurment, or more often for longer recordings. The tutorials linked below contain instructions for both options.
Forward Lean Calibration Tutorial🔗
4. Ensure you are calibrating again for each subject or after moving the IMU sensors. The calibration is only good for as long as the sensors remain in the same positions they were in during the initial calibration. If the sensors are moved to a new subject or are removed and replaced on the same subject, re-calibration using the Walking or Forward Lean calibration is necessary.
If issues persist, contact Noraxon Support for further troubleshooting steps and advice.